Jadavpur University Science Club Contributions
JUSC is a student body initiative under the TEQIP program for students from different backgrounds to interact and nurture their interests focused on scientific experiment, Robot building, circuits. I was an active member of the club. I collaborated with other members in robot building, designing actuators for robotics applications, and computer vision applications. Later I mentored young members in the club with our viewpoints and pragmatic learnings.
A brief highlight of my adventures can be found in the following paragraphs. You are encouraged to visit their official website to get to know about their present interests.
1.Reconstruction of the Azimuth Plane Using Ultrasonic Wave Echos Timeline: December 2015
Description: A two dimensional space scanner capable of reconstructing the real time view ahead of the sensor. Synchronized ultrasonic wave pulses were used to scan the environment upfront.
 ”
”
 ”
” Video demo: Reconstruction of a Dynamic Azimuth Plane using Ultrasonic Wave Echos
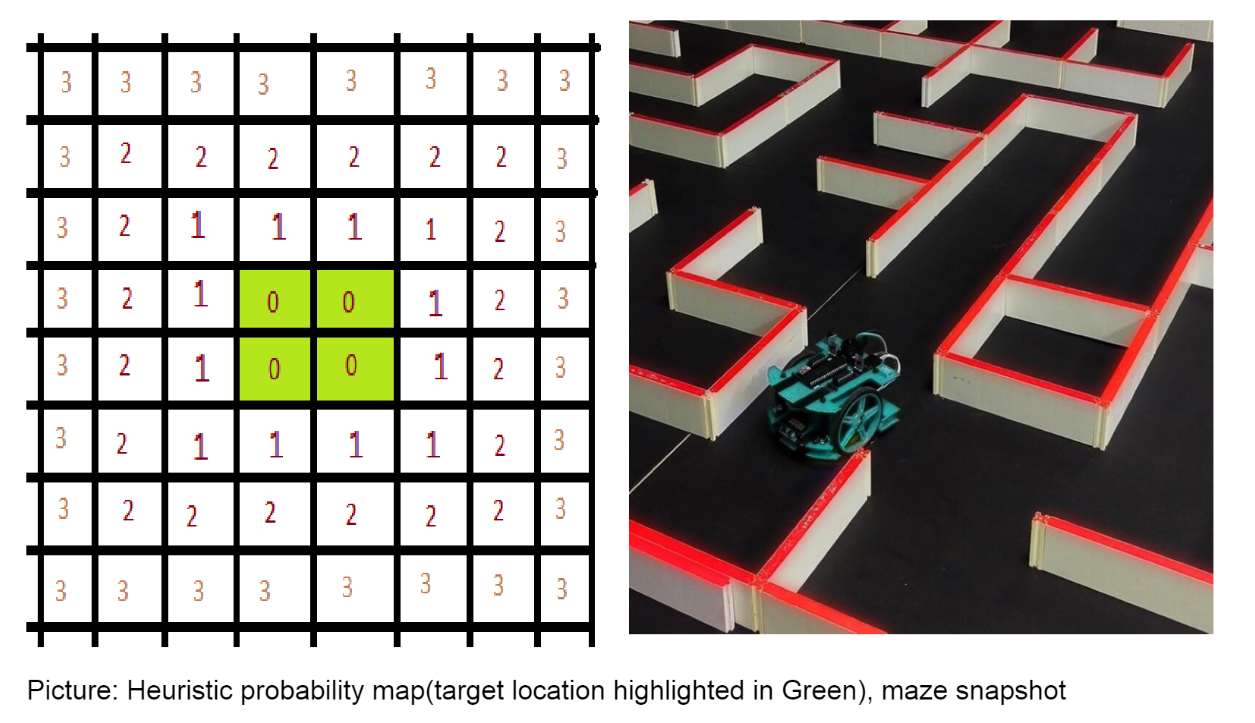
2.Artificially Intelligent Maze Solving Robot- Micromouse Timeline: January 2017
Description: A heuristic probability distribution based maze solving agent designed to reach a target grid location. The Robot used ultrasonic wave sensors to guide between the walls of the maze and used infrared LED based distance tracking method on the wheels to track the grids traveled in the maze. While traversing the grid the probability distribution map ( highlighted below) is used to take decision turns every time the agent is faced with multiple possible ways. If two or more ways have the same probability map value, values are chosen in a strict clockwise fashion. The agent usages a stack based tracking method to its previous relevant points of decision making to opt for the next priority way. The problem can be compared with the classical problem of depth first search in computer science where maze is the graph to be traversed. Choice of edges for prior travel are decided by the heuristic probability model. The agent only has the local neighborhood based and already traversed edge’s view of the graph.
 ”
”